
はじめに
前回はダイレクトエクストルーダー化を行ったが,今回は BLTouch を導入する.
材料
必要な材料はこれだけ.コネクタ,電線,工具類は省略.
クローンは精度が悪いんじゃないかという懸念があるかもしれないが,その辺りは偉大な先人が検証してくれているので必読.
配線
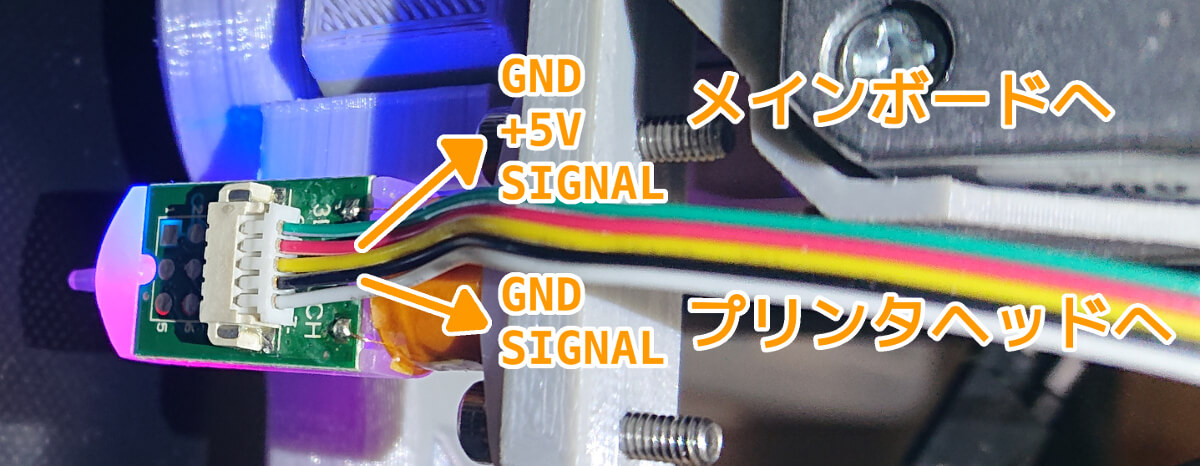
やることはこのページの通り.
BLTouch の 3 本の線はメインボードへ,2 本の線はプリンタヘッドの基板に接続すればいい.
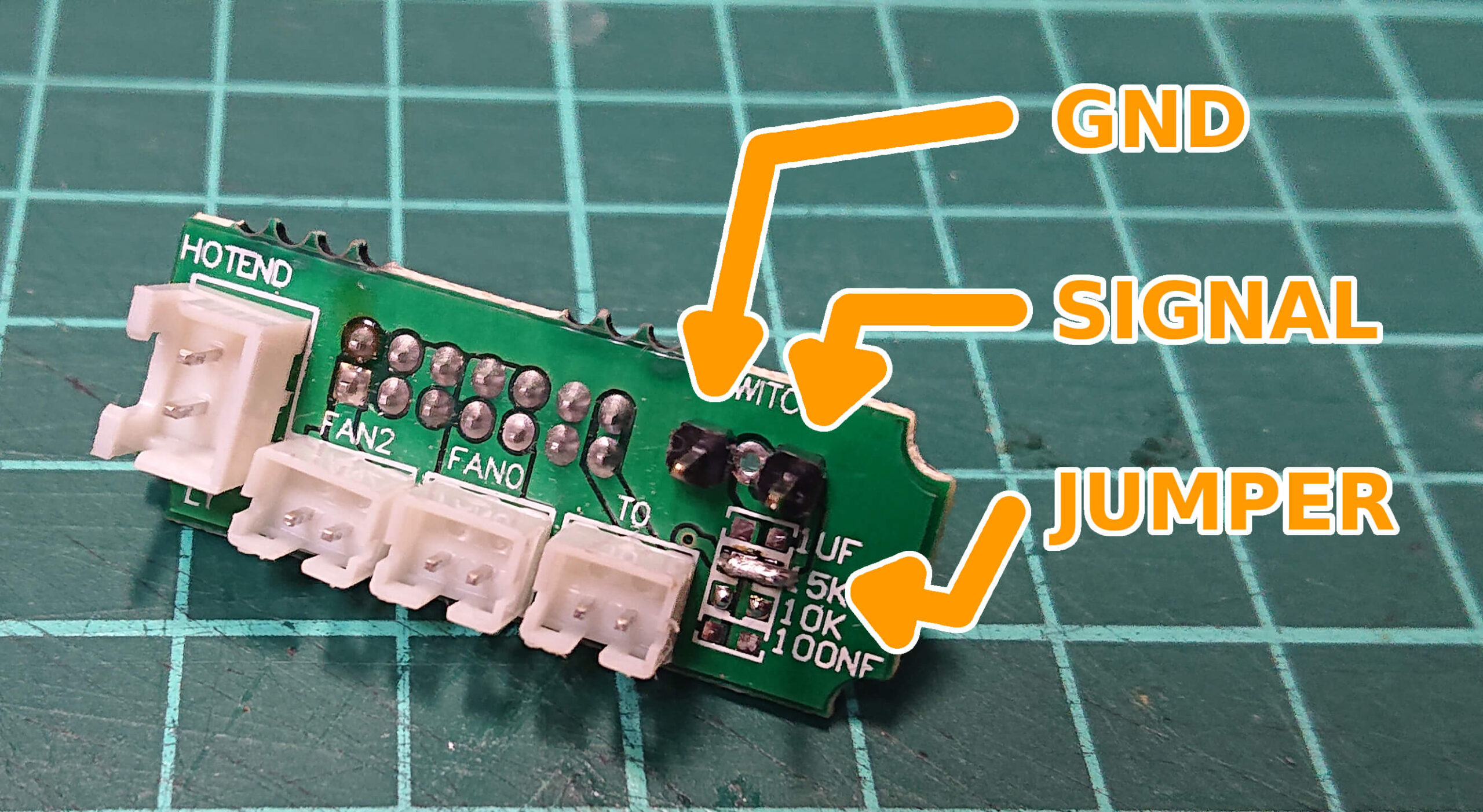
メインボードへ接続する 3 本はいいとして,プリンタヘッドの方の 2 本はちょっとはんだ付けしにくそう.基板を見ると未使用のスルーホールが3つあって,ジャンパ使えばこれが使えそう.こんなかんじ.
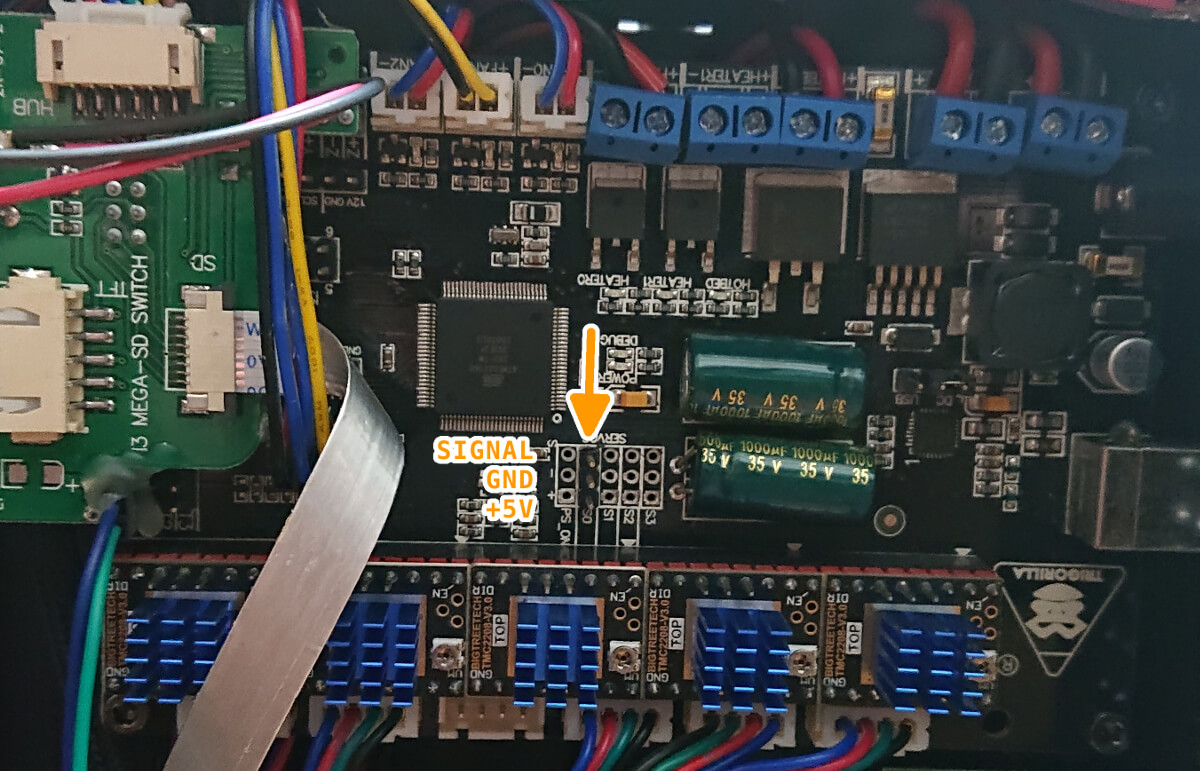
3 本の方はメインボードにピンヘッダがついてる部分に挿す.ただし,メインボードと BLTouch でピンの並びが違うので並び替えて挿すこと.
ファームウェア書き換え
ベースとなるファームウェアはこれを使う.ファームウェアのコンパイル方法は Yan 様の記事がわかりやすくまとめられているので必読.
最低限必要な部分を順に設定していく.
ノズルから BLTouch の位置を指定する.今回作成したプリンタヘッドだと X 方向 -36,Y 方向 -32 くらいのオフセットになっているので次の通り設定する.
/**
* Z Probe to nozzle (X,Y) offset, relative to (0, 0).
* X and Y offsets must be integers.
*
* In the following example the X and Y offsets are both positive:
* #define X_PROBE_OFFSET_FROM_EXTRUDER 10
* #define Y_PROBE_OFFSET_FROM_EXTRUDER 10
*
* +-- BACK ---+
* | |
* L | (+) P | R <-- probe (20,20)
* E | | I
* F | (-) N (+) | G <-- nozzle (10,10)
* T | | H
* | (-) | T
* | |
* O-- FRONT --+
* (0,0)
*/
#define X_PROBE_OFFSET_FROM_EXTRUDER -36 // X offset: -left +right [of the nozzle]
#define Y_PROBE_OFFSET_FROM_EXTRUDER -32 // Y offset: -front +behind [the nozzle]
#define Z_PROBE_OFFSET_FROM_EXTRUDER 0 // Z offset: -below +above [the nozzle]オートレベリングするエリアを指定する.今回のヘッダだと,だいたいこれくらいの値になりそう.
// Set the boundaries for probing (where the probe can reach).
#define LEFT_PROBE_BED_POSITION 10
#define RIGHT_PROBE_BED_POSITION 150
#define FRONT_PROBE_BED_POSITION 10
#define BACK_PROBE_BED_POSITION 190ちなみにベッドサイズはこんなかんじで指定されていて,ここまでのパラメータの位置関係をまとめるとこんなかんじ.コンパイルでエラーしたらプローブ可能なエリアを指定できているか要確認.
// The size of the print bed
#define X_BED_SIZE 215
#define Y_BED_SIZE 215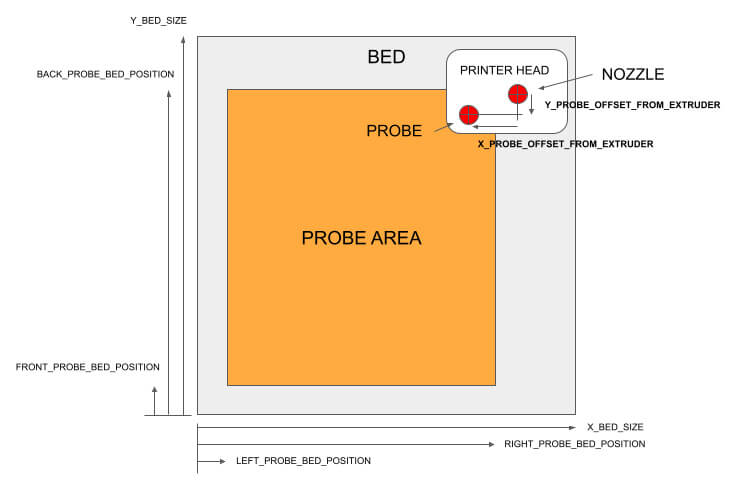
ついでに,前回エクストルーダーの配線を物理的に反転させたが,ファームウェア側で反転させておく.(INVERT_E0_DIR = true → false)
// @section extruder
// For direct drive extruder v9 set to true, for geared extruder set to false.
#define INVERT_E0_DIR false // set to false for stock drivers or TMC2208 with reversed connectors
#define INVERT_E1_DIR true // set to false for stock drivers or TMC2208 with reversed connectors
#define INVERT_E2_DIR false
#define INVERT_E3_DIR false
#define INVERT_E4_DIR false
#define INVERT_E5_DIR false後はコンパイルして,Cura でファームウェアを書き込めば作業完了.
おわりに
部品はかなり前から準備していたものの,なんとなく面倒で放置していたが,実際作業してみるとそんなに難しいことは無かった.一番面倒なのはパラメータチューニング沼と配線の取り回し...


コメント