 Hardware
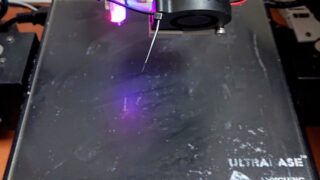
Hardware AI3M 磁気ベース&PEIシート化
ガラス製UltraBaseが定着しなくなったAI3Mを磁気ベッド化。交換手順に加え、Z_TILT_ADJUSTやBED_MESH_CALIBRATEでのチューニング方法も解説します。
Hardware  Hardware
Hardware  Hardware
Hardware  Hardware
Hardware  Software
Software  Hardware
Hardware  Software
Software  Hardware
Hardware  Hardware
Hardware  Software
Software