
はじめに
この記事では,これまで実装したプロットマシン関連の記事をまとめる.まだ記事にしていない部分や,未実装の部分もいずれ追記していく.
卓上ペンプロッタを作る シリーズ
Arduino NanoとCNC Shield V4をベースに,Grblファームウェアを用いて制御する卓上サイズのペンプロッタ制作プロジェクト.ベクター画像(SVG)からGコードを生成し,Universal G-Code Sender(UGS)を用いて描画するまでの一連の工程を解説している.
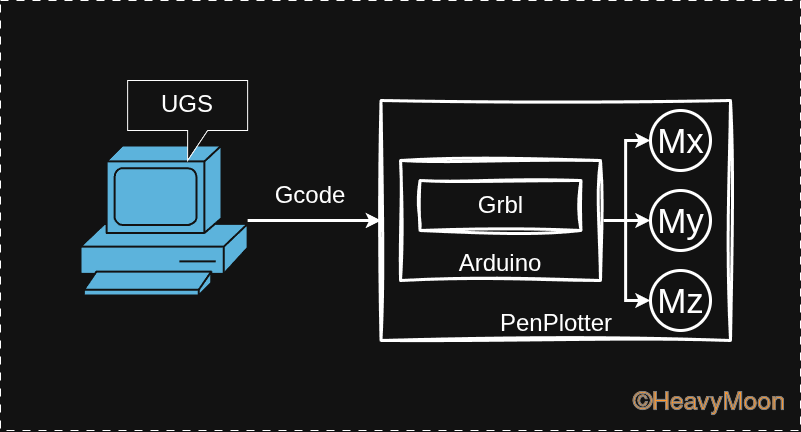
Grbl構成のメリットは,Gコードを直接マイコンで解釈してステッピングモータを駆動するため,ペンプロッタ本体をシンプルかつ小さく実装ことにある.その一方で,ペンプロッタの外側にUGSのようなGコードを送信する仕組みを設ける必要がある.
初めて実装したペンプロッタということもあり,当時の3Dプリンタの性能に対して小さすぎるパーツやネジの配置など,今思うとやや無理のある構成だったかもしれない.これから内容のトレースを考えている好事家がいるとしたら,XY-Plotterの方をベースに実装することをおすすめする.このシリーズではモータ制御の仕組みなども説明しているため,初めてペンプロッタを実装する人は参考として一読しておくといいかもしれない.

ステッピングモータ,サーボモータ,CNCシールド,スライド用の金属棒やバネなど,ハードウェア構築に必要な基本部品の選定と調達について解説.
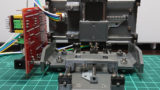
ステッピングモータの仕組み(バイポーラ駆動)や極性の特定方法,サーボモータの概要を説明した上で,X軸・Y軸およびペンマウント部の組み立て・ハンダ付け工程を解説.
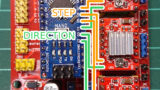
Arduino NanoへのGrblファームウェア書き込み手順,PC側の操作ソフト「Universal G-Code Sender」の導入,およびモータドライバのVref(リファレンス電圧)調整手順を解説.

Inkscapeとエクステンション「J Tech Photonics Laser Tool」を使用し,SVGデータからGコードを生成する手順,および原点合わせと実際のプロット手順について解説.

マイクロステップの有効化,ホーミング機能の追加,サーボモータの交換とノイズ対策など,プロッタの精度と安定性を向上させるための手法を解説.今思うとマイクロステップやホーミングは有効なアップグレードだったが,コンデンサ周りの話は的外れだった.動作が不安定だった原因はサーボモータ駆動時の電圧降下であり,本来は電源の強化をすべきだった.ただ,このマシンは既に解体してしまったので今更どうするつもりも無い.
XY-Plotter シリーズ
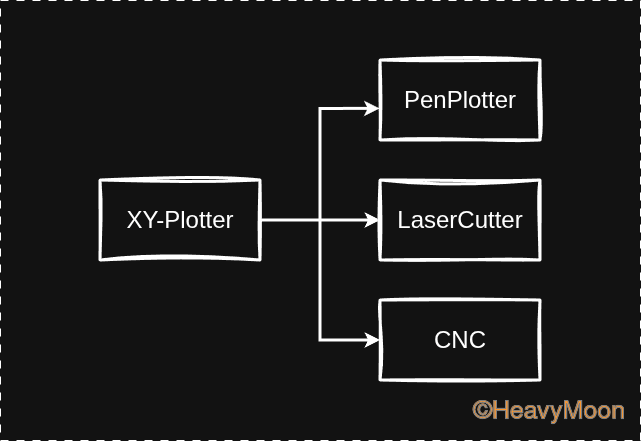
ペンプロッタのみならず,レーザー加工やPCB切削加工への転用を見据え,ヘッド部をモジュール化したCoreXY構造の汎用プロッタ制作プロジェクト.制御系には3Dプリンタ等で実績のあるKlipperファームウェアを採用している.
現時点までに投稿した記事ではペンプロッタの構成までしか書いていないものの,レーザーカッターは既に実装済みで近いうちに記事を書くつもり.CNCも材料は買ったので,やる気が出たら実装するつもり.
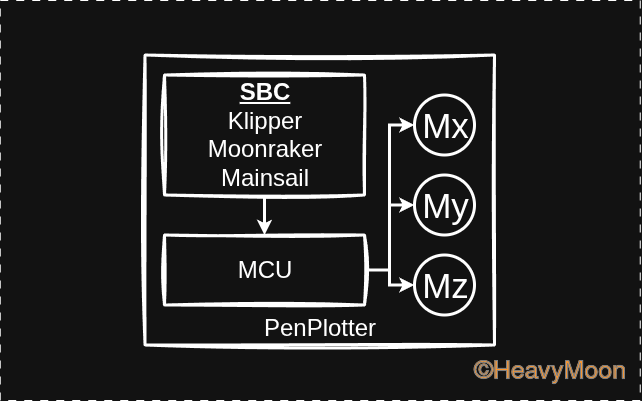
Klipper構成のメリットは,ペンプロッタ本体にSBCを搭載することで,CoreXYの協調制御など,複雑な計算をホスト側のCPUで処理するため,高精度かつ高速な描画が可能.GrblやMarlinのようにファームウェアを再コンパイルすることなく,Linuxの設定ファイルとしてマシンの動作を変更することができ,マシン単体で稼働できる.一方でMCUとSBCの両方を本体に搭載しなければならず,Grbl構成よりも本体側の構成要素が増え,小さく実装するには不利になる.
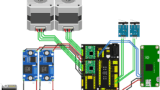
Klipperを用いた制御コントローラの実装手順について解説.
MDF板をベースに,スライドレール,ボールベアリング,タイミングベルト等を組み合わせたCoreXY構成のハードウェア組み立て手順を解説.

2つのモータを協調動作させるCoreXYの制御概念と,Klipper上でのX/Y軸の動作設定およびコンフィグレーション手順について解説.

用途に応じて取り外し可能なモジュール式ペン上下機構(サーボ駆動)の組み立てと,Klipperでの制御設定について解説.
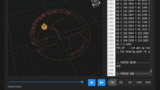
プロッタの描画エリアに合わせたInkscapeのドキュメント・グリッド設定,およびGコード生成から実際の描画に至るまでのフローを解説.

ヘッドをペンからレーザーへ換装し,レーザーカッターとして構成変更する方法を解説.
Part7:PCB CNC実装(仮

コメント