はじめに
前回は材料紹介をしました.

今回は組み立てについて説明していきます.必要な部分はハンダ付けなども行います.
ステッピングモータの準備
簡単なステッピングモータの仕組み
せっかく自分作るので動作の仕組みも知っておくと楽しさ倍増です.ステッピングモータの仕組みを理解しておきましょう.
オリエンタルモーター株式会社様がわかりやすく説明しています.最低限次の動画を見て概要だけでも掴んでおくと良いでしょう.

コイルの位置を調べる
Amazonの商品説明では使い方がさっぱりわからないので,極性などを自分で調査していきます.
端子が4つなので2相モータのバイポーラ駆動です.中身はコイルが2つ入っているだけなので,テスターで通電確認すればどの端子間にコイルがあるのか確認できます.

今回用意したステッピングモータでは次のように接続されていました.適当に線をハンダ付けします.

まだ極性が分からないので線の反対側この状態まで.動作確認時に順番を差し替えながら極性を確認していくので黒いプラスチックにはまだ差し込みません.
サーボモータの準備
簡単なサーボモータの仕組み
サーボモータにはエンコーダ(回転検出器)が組み込まれていて,フィードバック制御による正確な回転角を出力することができます.
今回使用するSG92Rはホビー用途のDCサーボですが,概念がわかりやすい動画が見つからなかったのでACサーボの動画を貼っておきます.基本的な考え方はACサーボと変わりません.ACサーボについてはひとまず概念だけ理解しておきましょう.
SG92RはPWMというパルス幅で角度の制御を行います.どんなふうにパルス幅で角度を制御しているかはこの動画がわかりやすそうです.
今回はこの動きをペンの上げ下げに利用します.
サーボモータのコネクタ準備
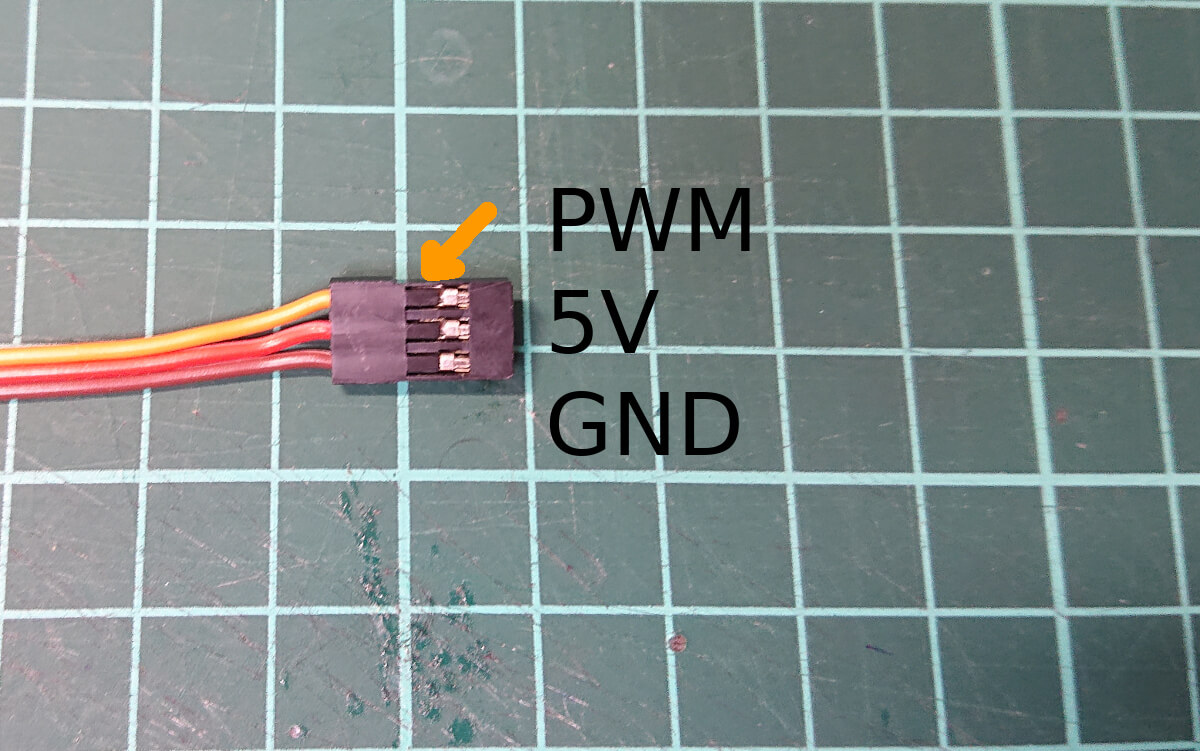
SG92Rのコネクタは3つの端子が1列に並んだ形状をしていますが,CNCシールドに接続するために制御の線だけ分離します.
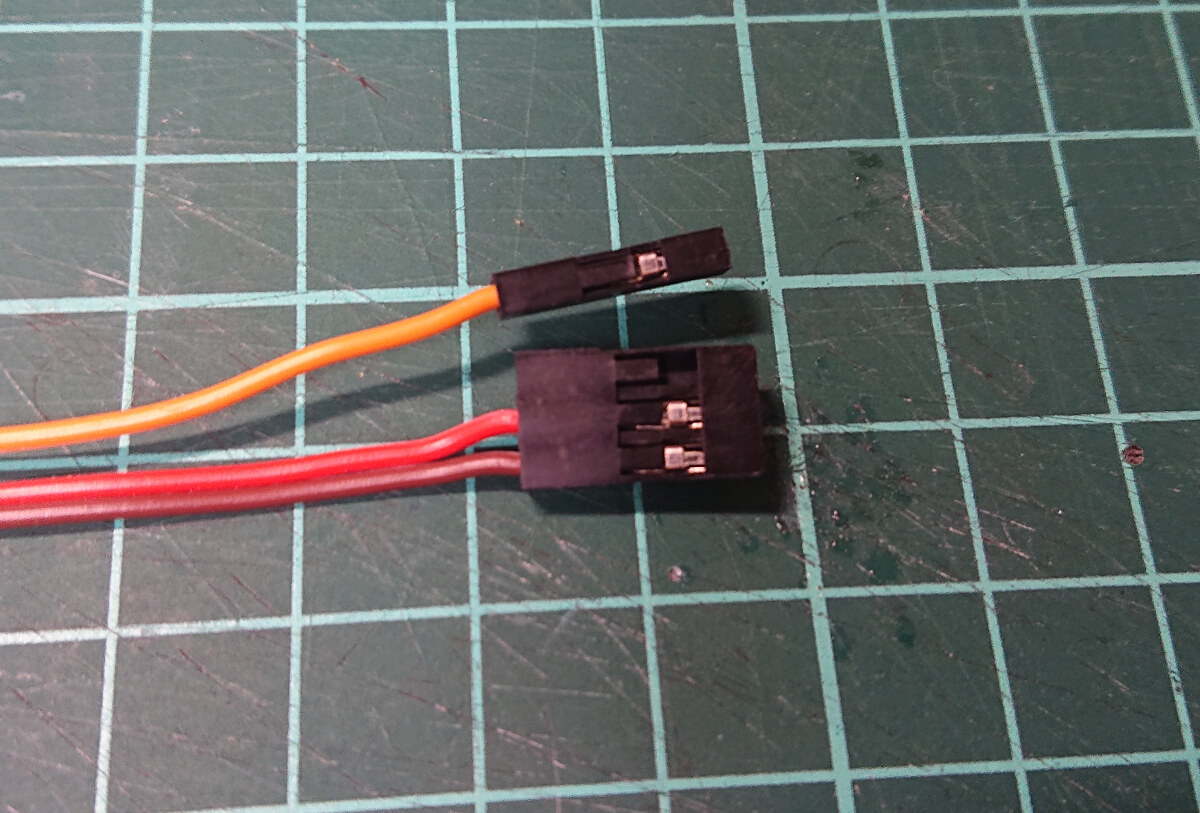
コネクタは小さい爪を持ち上げると引き抜けるので,これを
こうします.
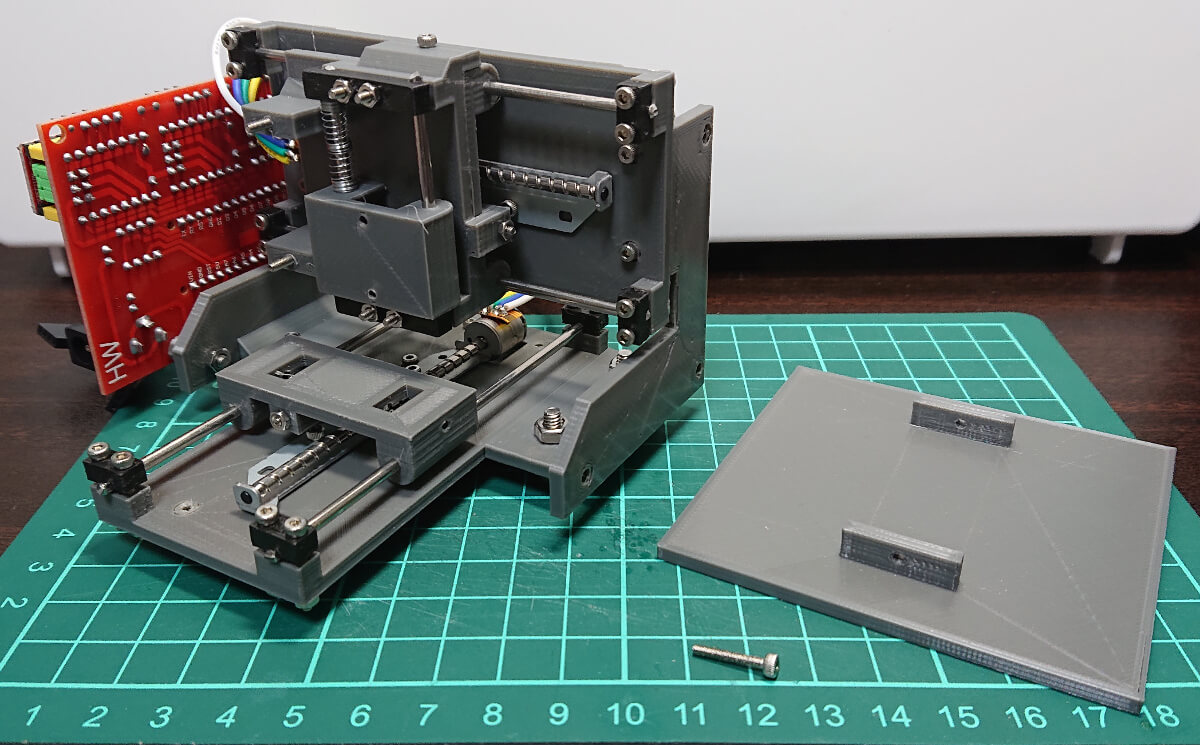
組み立て
DMMでフレームを発注するとパーツが塊になってくると思いますので,適当にバラしておいてください.
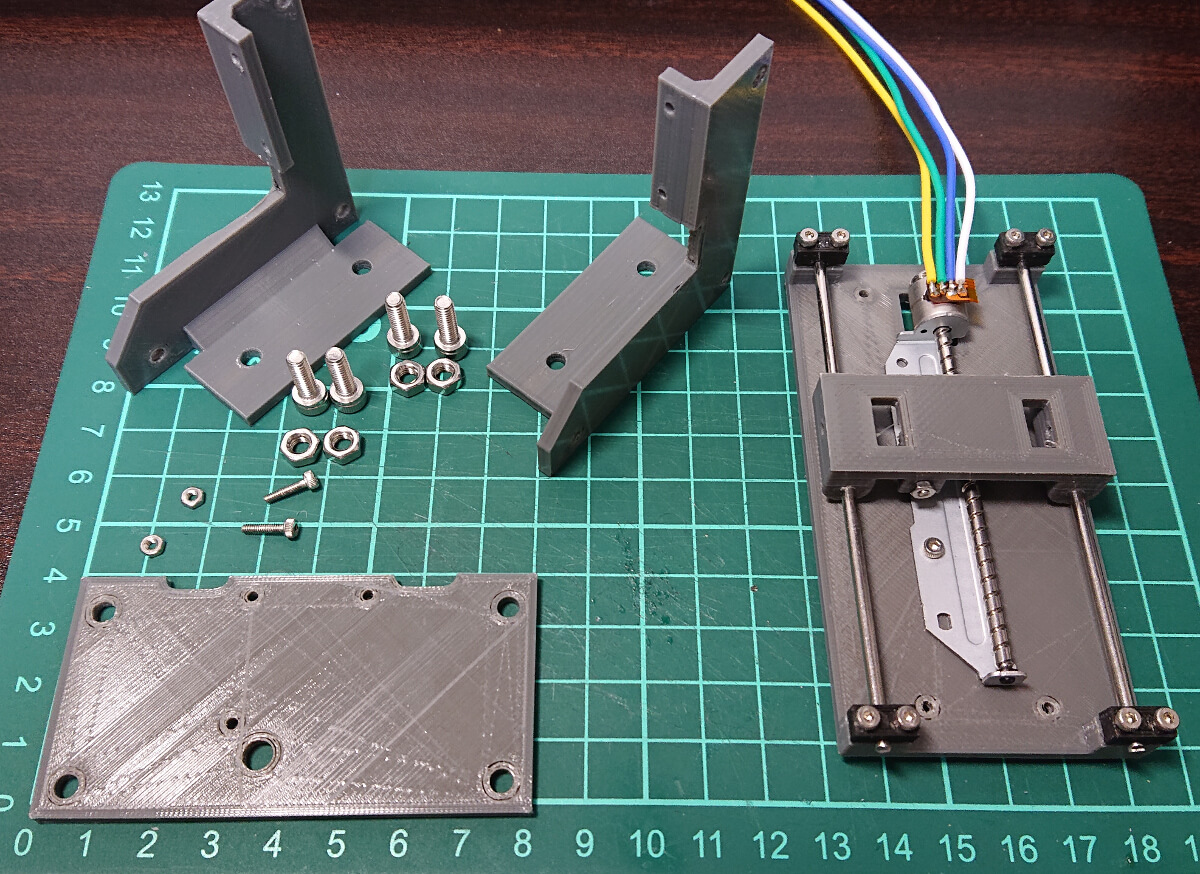
ペンの取り付け部分を組み立てる
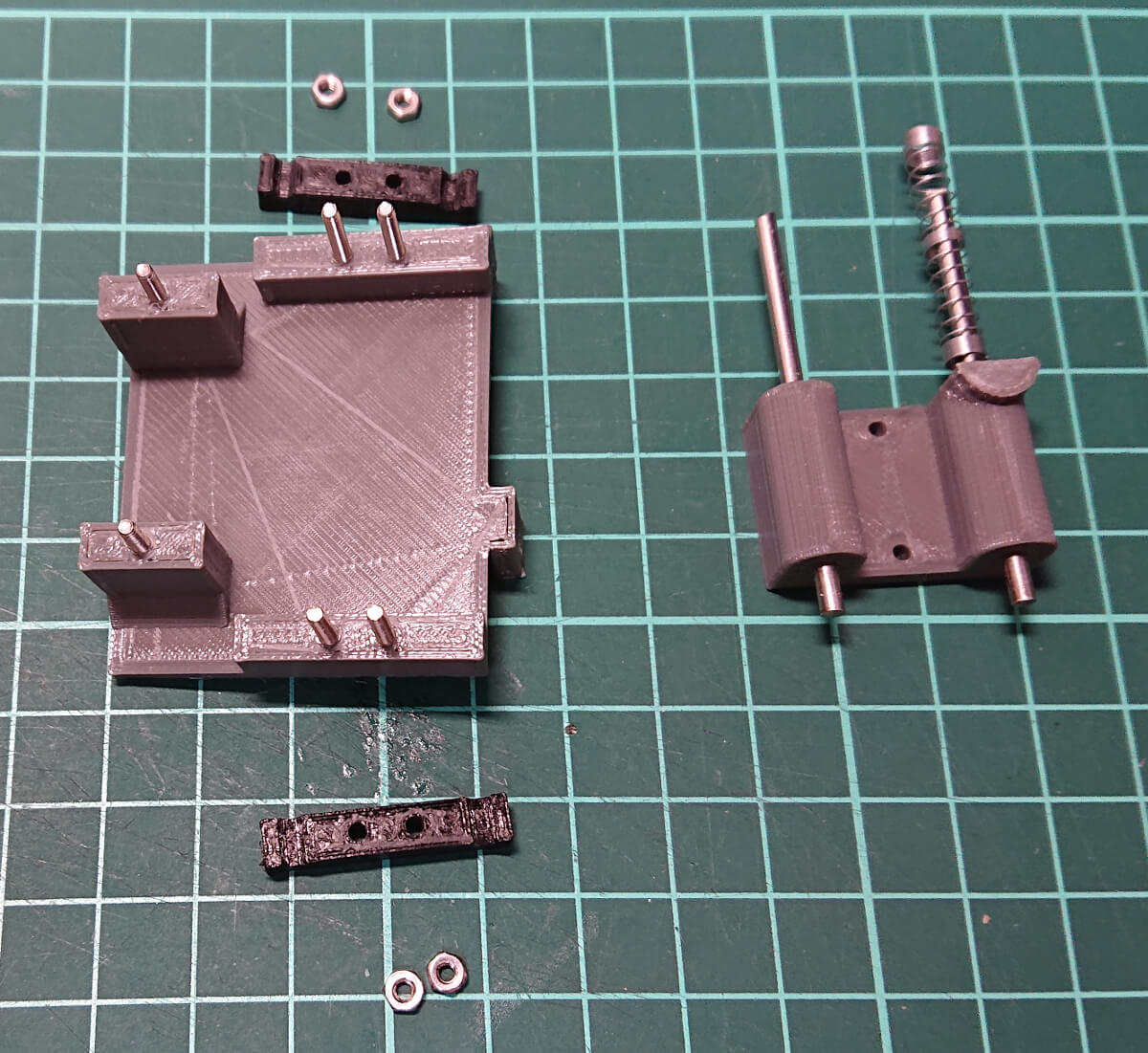
必要な部品はこちら.ペンの位置は組み立てた後に調整します.

大きいパーツには後ろからネジを挿し込みます.
あとは,これをこう.
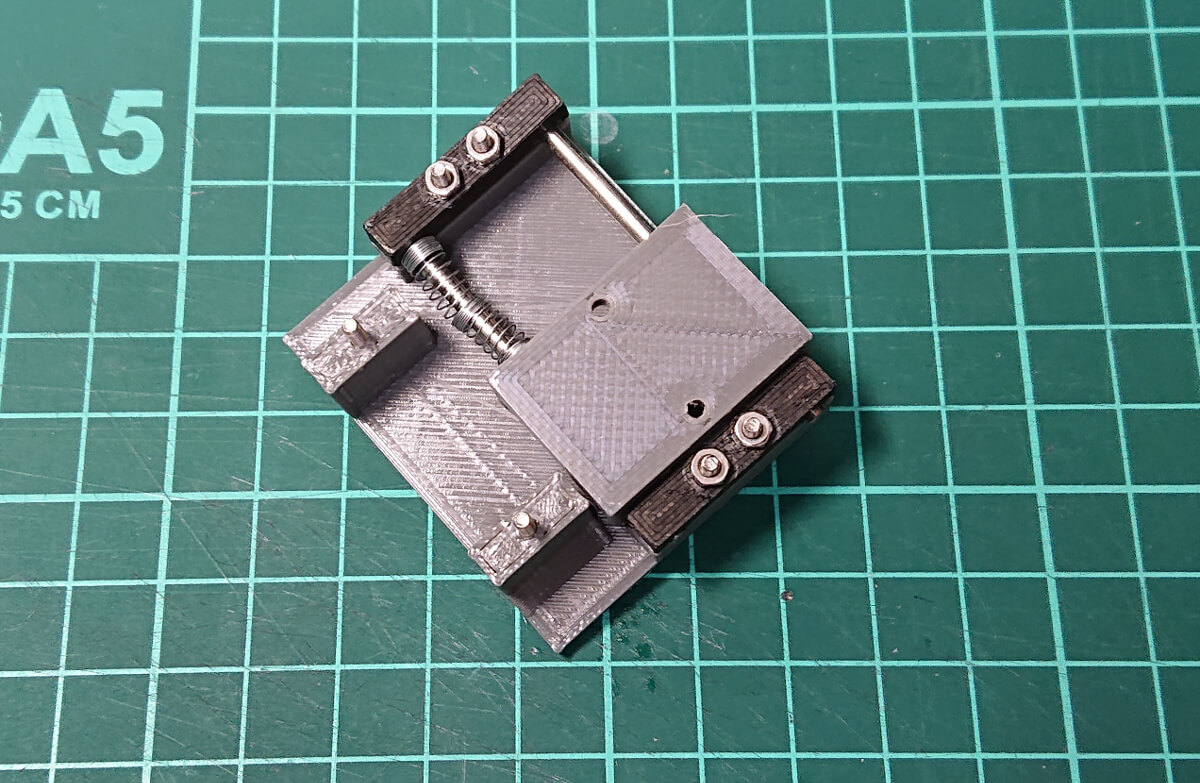
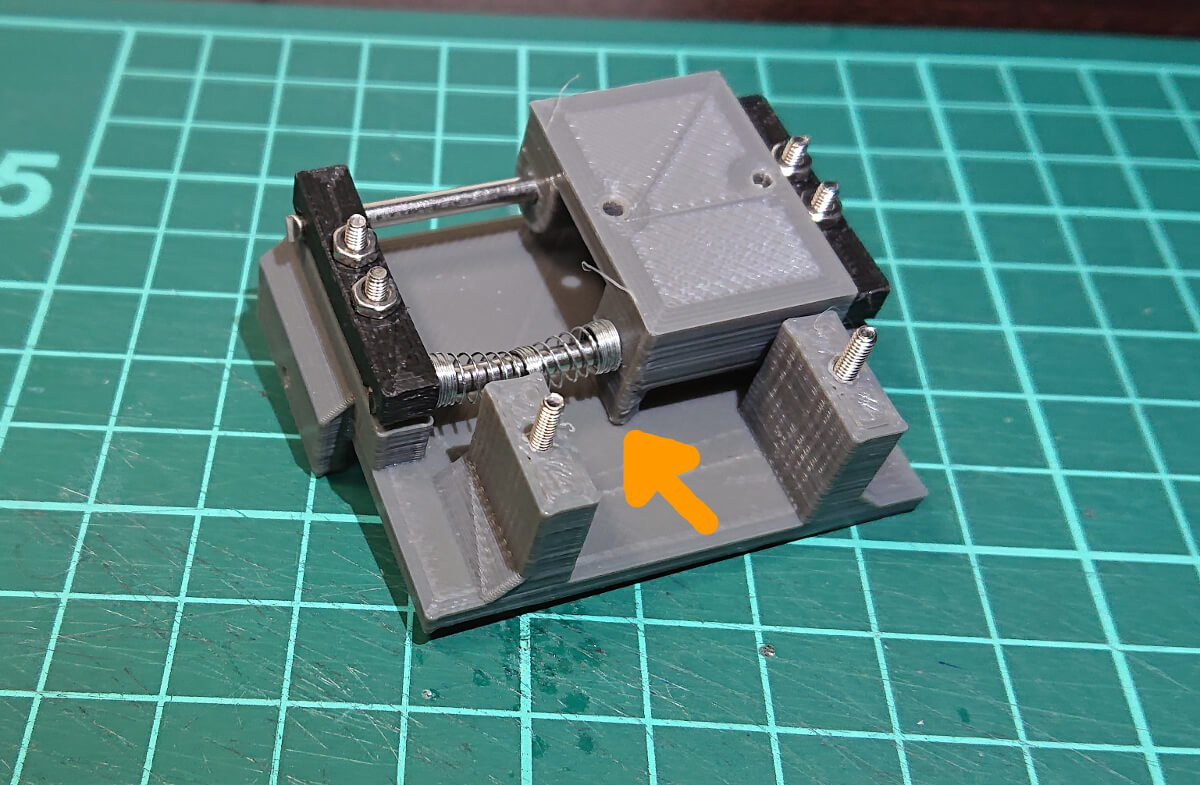
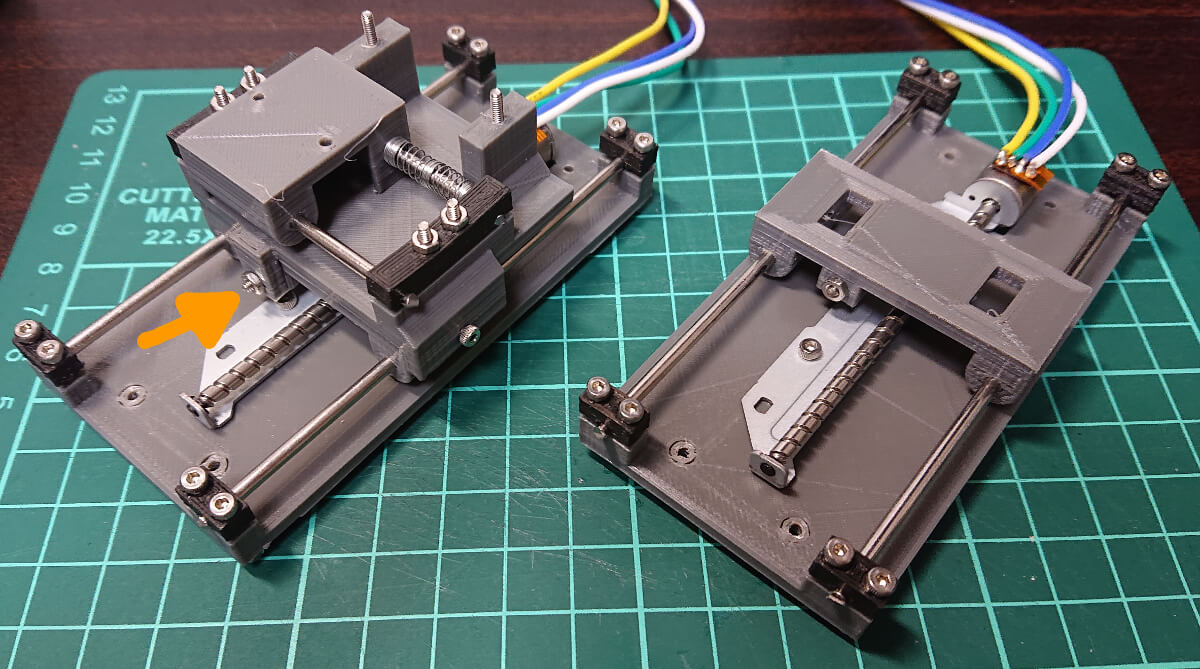
スライド部分の突起はこちら側に来るようにします.突起が下の面と接触する場合はギリギリ触れないようにヤスって調整して,スルスルと動く状態にしてください.
ボールペンマウントはこのタイミングでつけておいてOKです.ボールペンマウントは諸々写真を取った後に作ったので,組立時の画像は無いです...
X軸とY軸を組み立てる
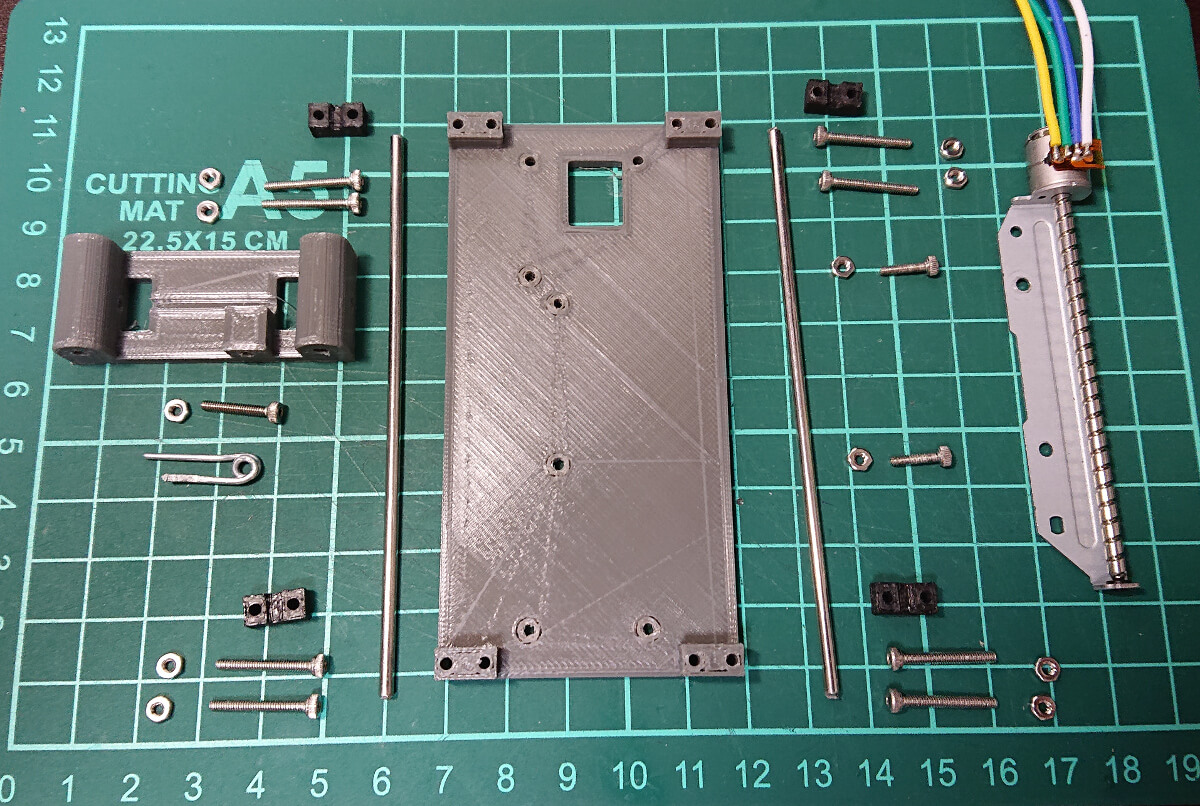
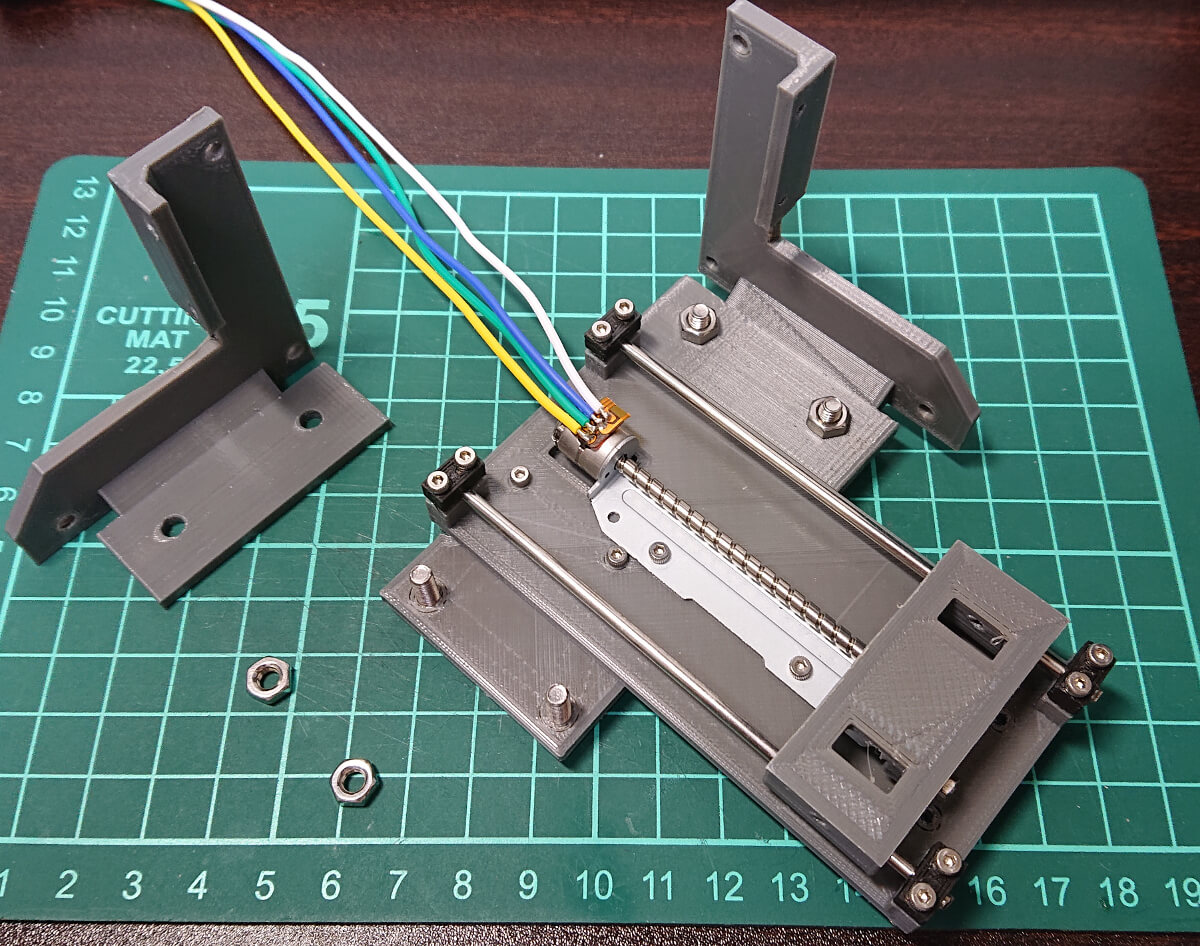
まずはY軸だけで必要な部品はこちら.針金は材料収集で説明した通り,ステッピングモータの溝に沿わせるために使います.
あとは,これをこうして
こう.
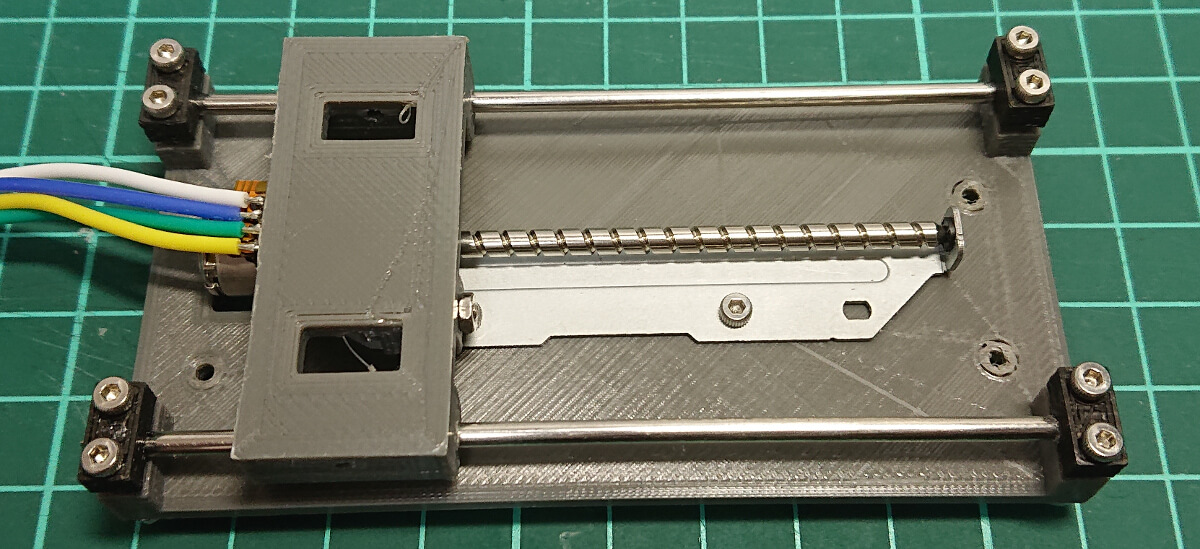
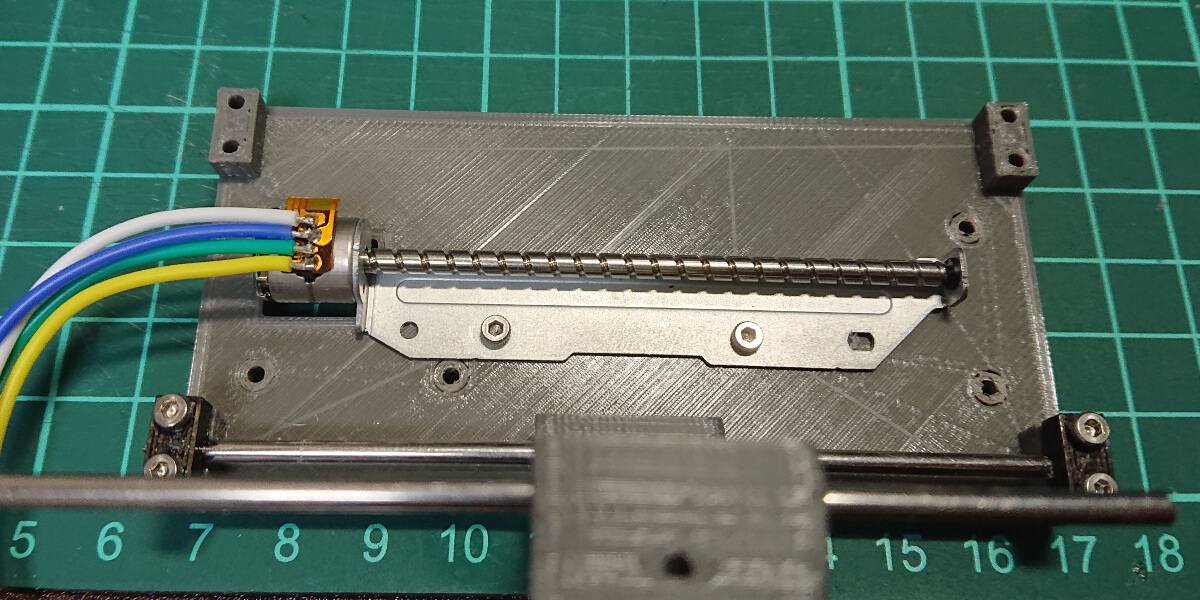
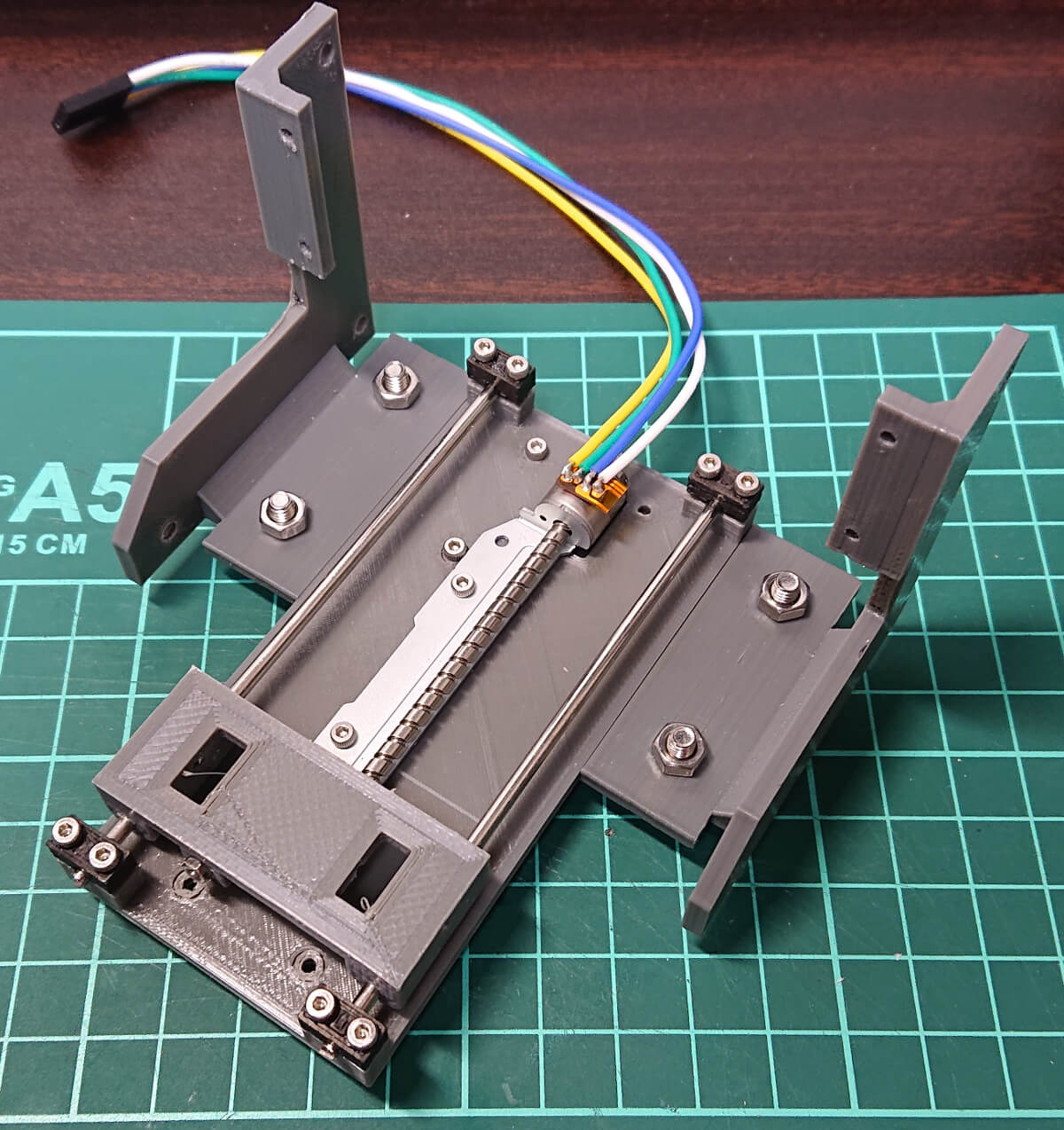
組み立てるときは片側の棒を固定した状態で,もう片側の軸がほんの少しだけ浮くように針金を調整します.あまりステッピングモータの回転軸に強く針金を当てると,ステッピングモータの回転を阻害します.逆にゆるゆるにすると脱調しやすくなります.
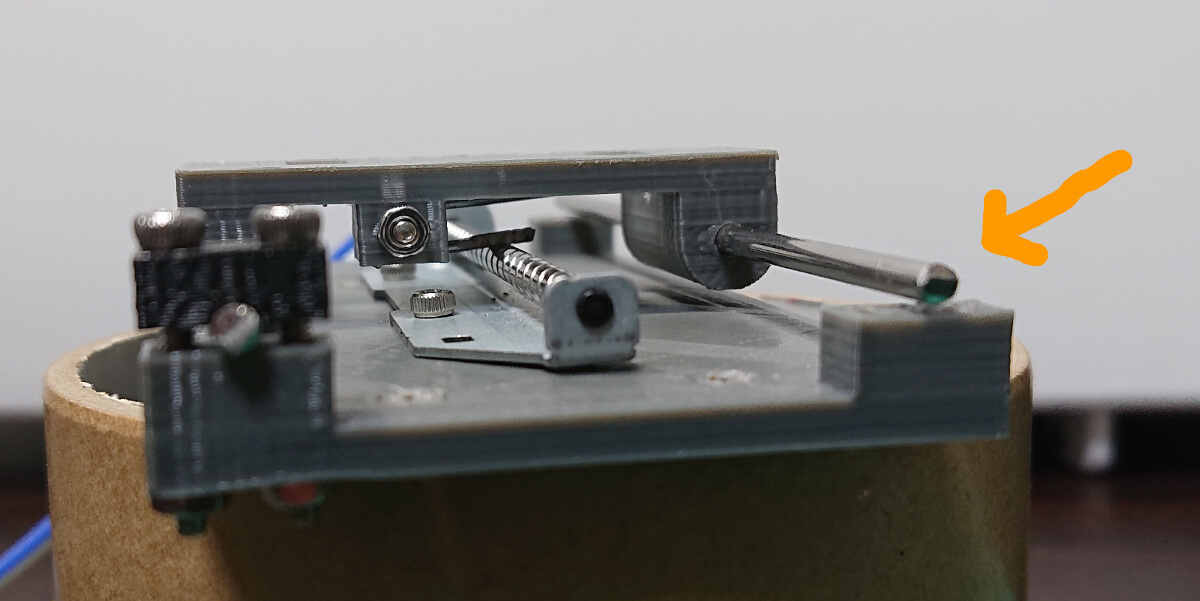
またステッピングモータの軸を指で回転させたり,スライド部分を直接動かして,ステッピングモータの回転軸全ての位置で同じような抵抗感となるように調整します.おそらくこの調整が組み立ての中で一番難易度が高く重要なポイントです.
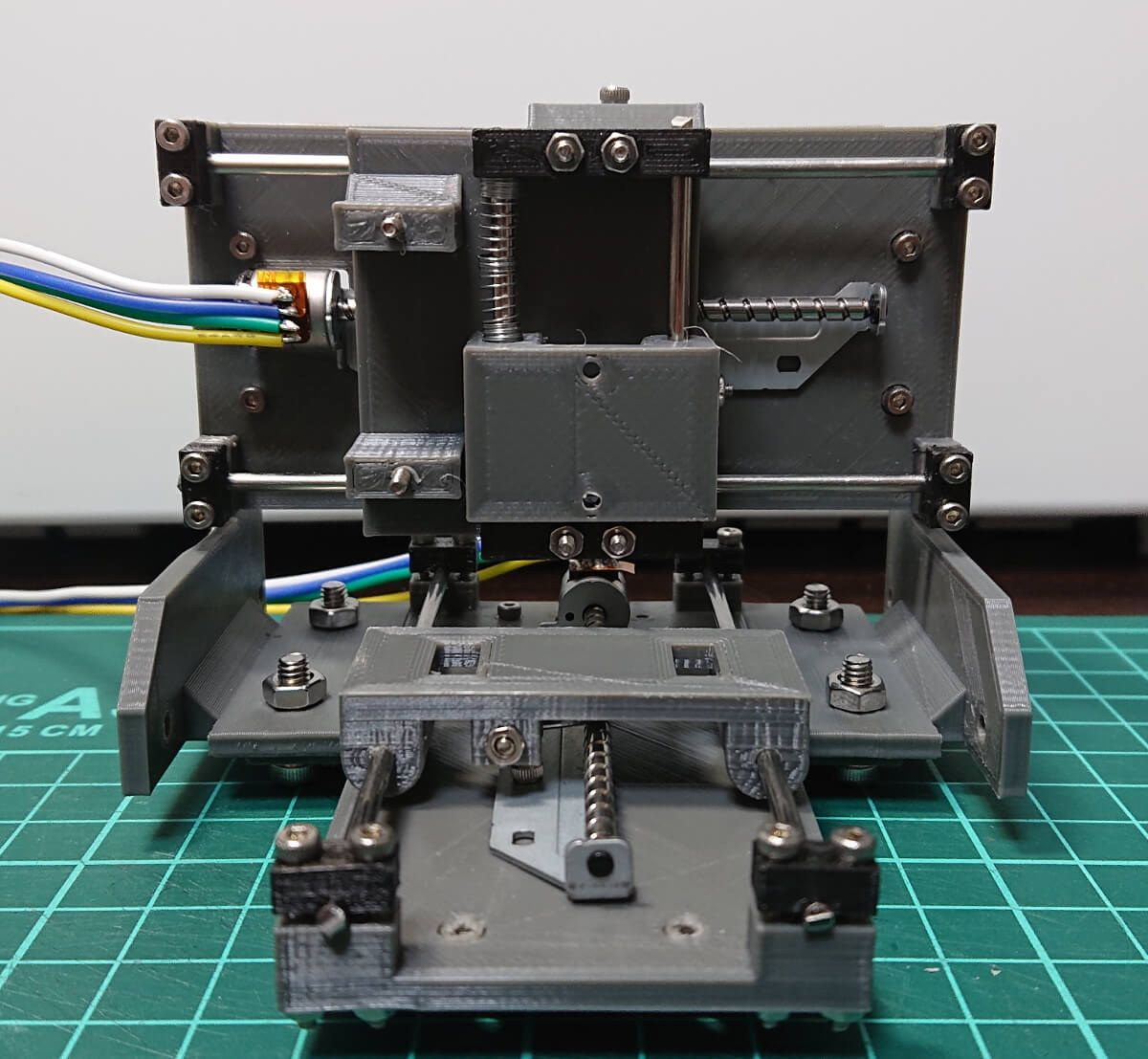
X軸の組み立ても同様ですが,こちらは最初に組み立てたペンを上下させる部分と一緒にネジ留めします.
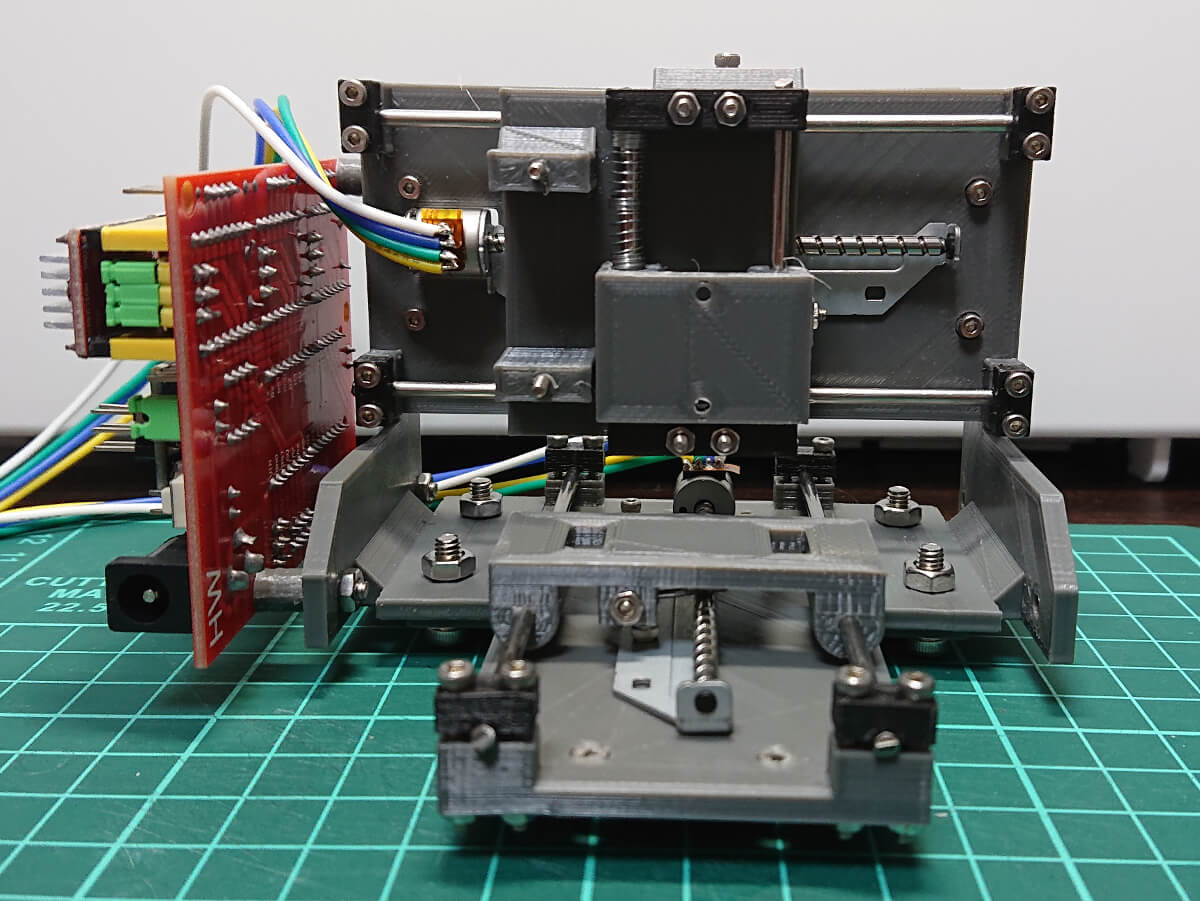
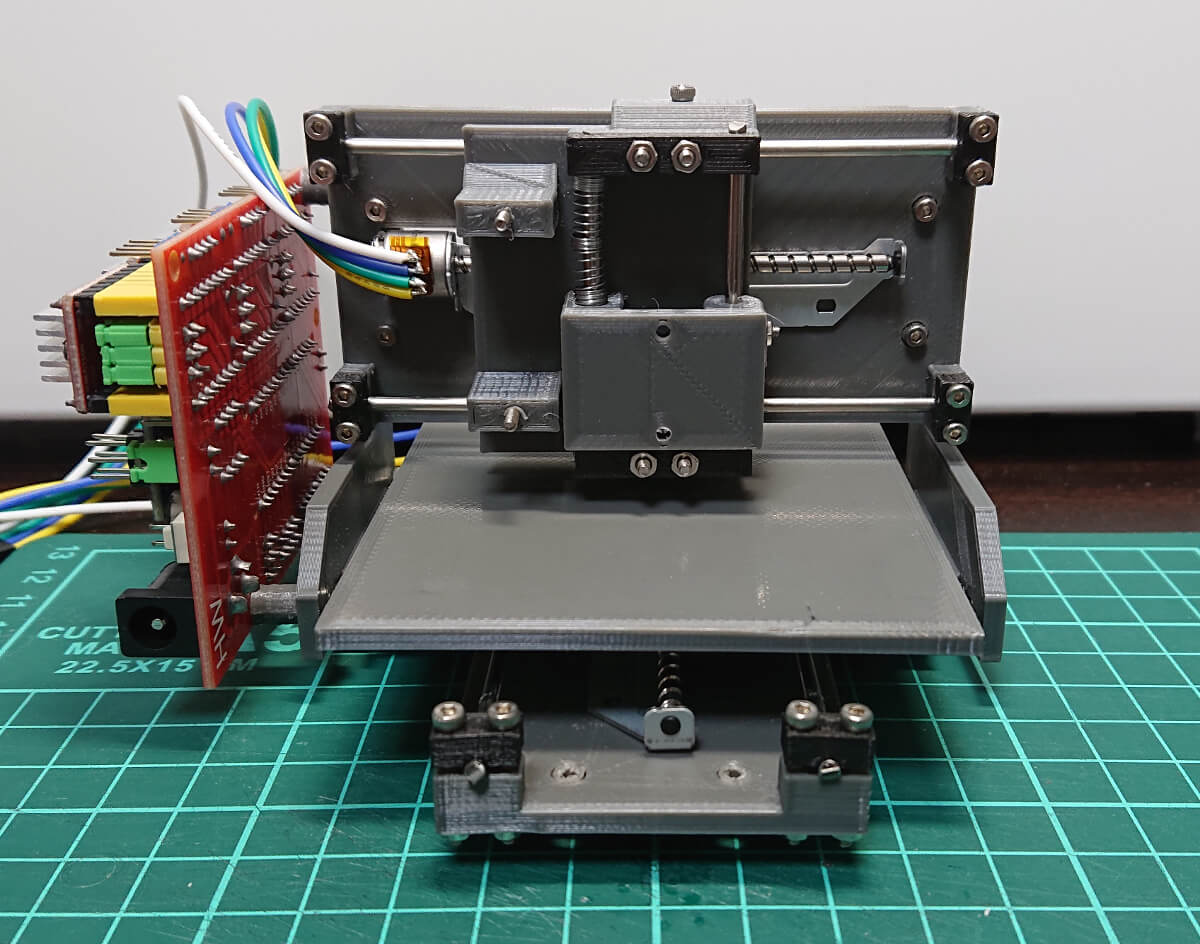
X軸とY軸とCNCシールドを合体
これを
こうして
こうして
こうして
こうして
こうして
こう!説明がめんどくさくなってきた
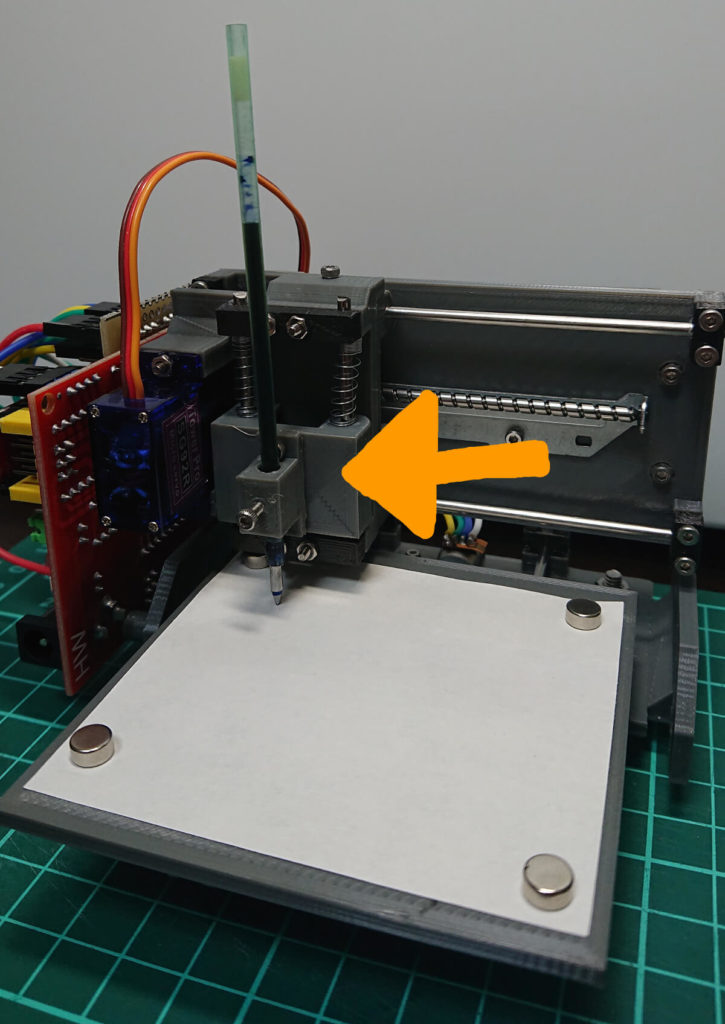
ペンの位置調整
※この画像ではサーボモータを取り付けてありますが,サーボモータは動作確認した後に取り付けたほうが良いです.
ペンの高さやバネの強さを適当に調整します.ペンをテーブルに強く押し付けすぎるとX軸Y軸が動かなくなります.
おわりに
今回は組み立てについて説明しました.
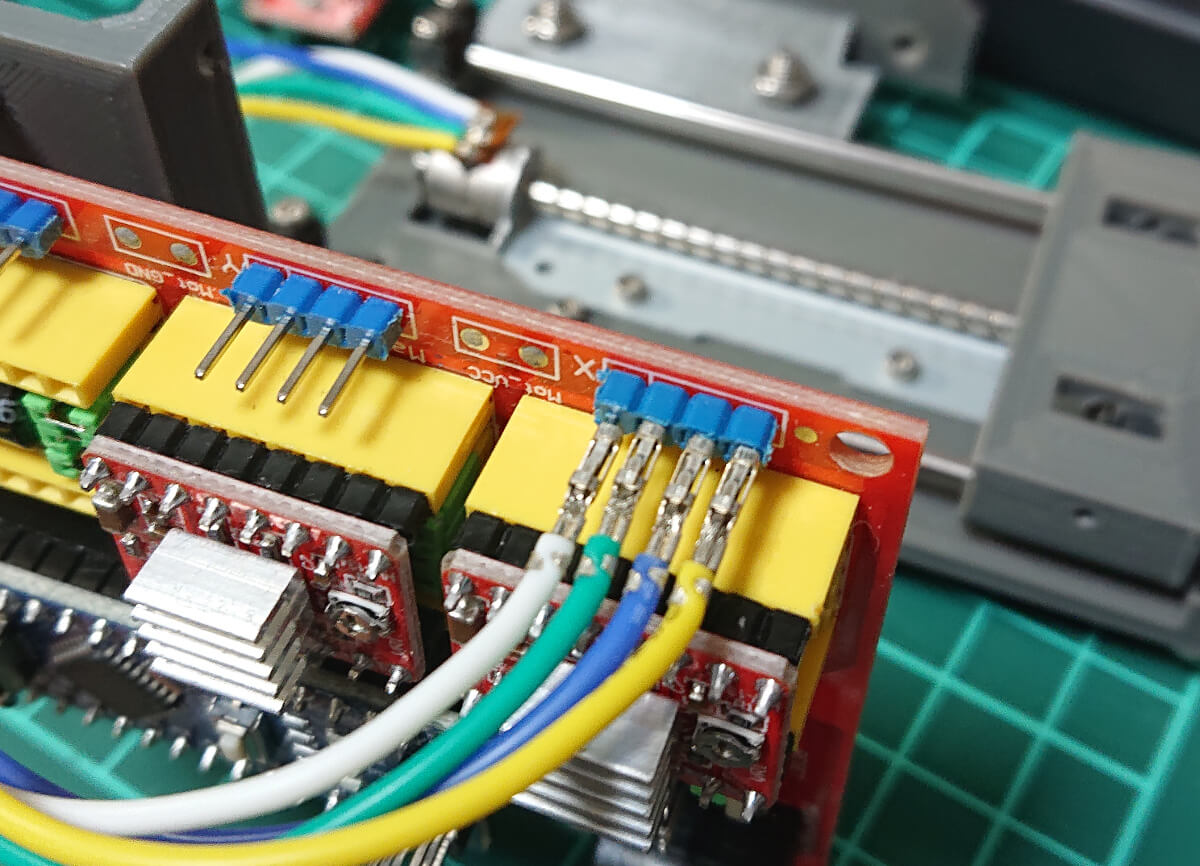
ステッピングモータの極性確認,サーボモータの取り付け,CNCシールドへの接続は次回行います(実は写真の配線順のままでOK).ただしモータドライバの調整をしていないので,先走ってこのまま動作させようとするとモータが過熱してしまうので注意してください.
ペンプロッタのまとめページはこちら.よかったら覗いていってください.



コメント