はじめに
コロナの影響で「オンライン帰省」なるワードが登場した.新しいワードで最新感を出したいだけで,結局はただのビデオ通話であり違和感を感じる.
一方で日本にはお盆という祖霊信仰行事があるが,これは乱暴に言えば「祖霊帰省」であると思う.なぜお盆は受け入れられて,オンライン帰省に違和感を感じるかというと,魂と呼ばれるものの所在と物理的な肉体(遺骨)の所在の乖離であるような気がする.
ではどうすればこの違和感を解消できるかというと,一つ解として分身ロボットが実用化されている.自身の依代を遠隔地に配置することで,遠隔地でも魂の所在と物理的な依代の所在を一致させることができ,この違和感を解消したいと言うのが今回の目的.

今回は部品と物理構成の整理をする.制御ソフトの話は長そうなのでそれは後日.
ロボカムの構成部品
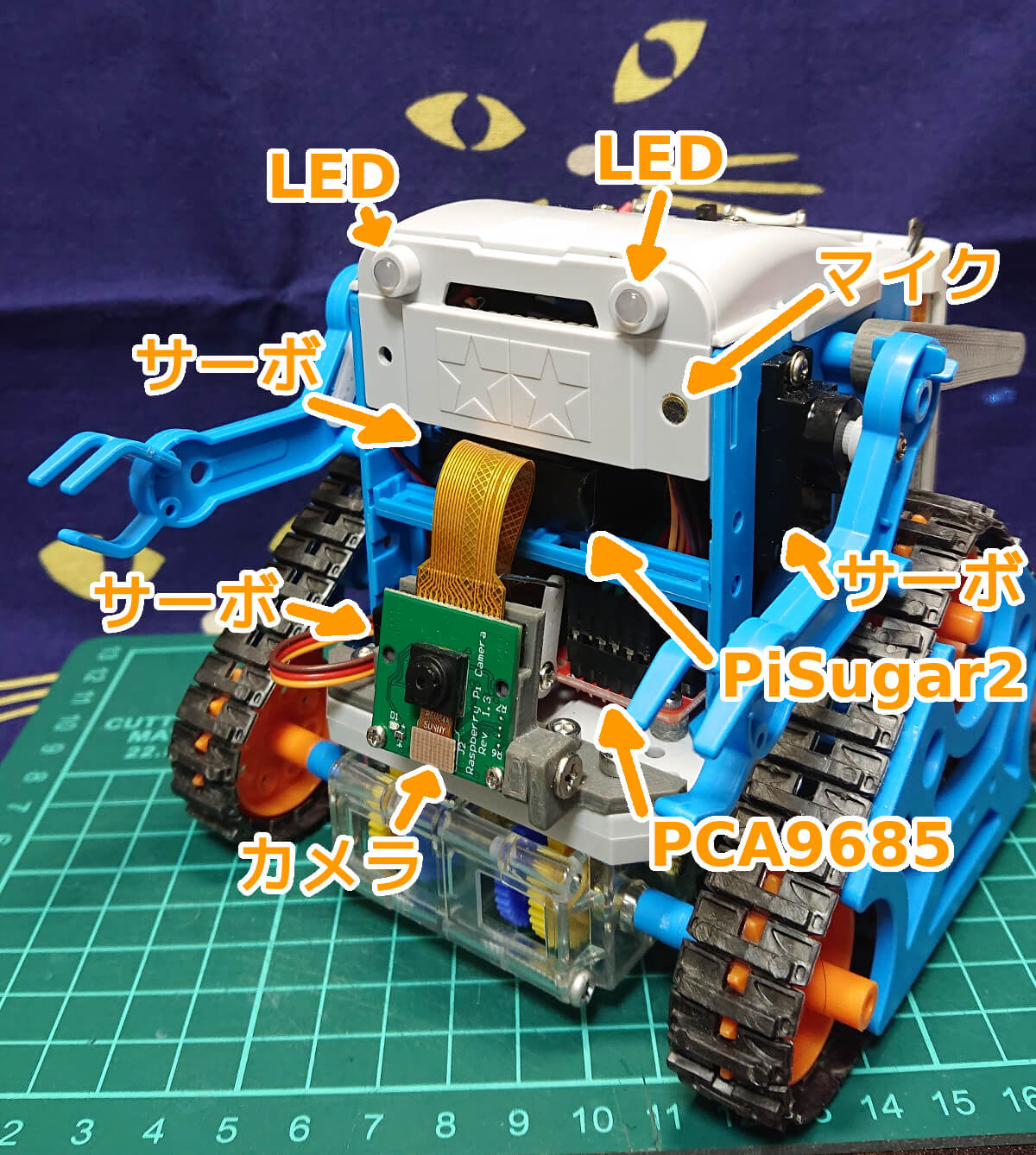
使っている材料は次の通り.依代本体はカムロボをベースとし,可能な限りこのボディの原型を留められるよう小型の部品を選定する.頭や腹部から基板が飛び出している様な作例をネット上で見かけるが,正直あまり美しくないと思う.電線,コネクタ,工具類は省略.
- カムロボ
- RaspberryPi Zero W
- PiSugar2
- MX1508
- PCA9685
- サーボモータ(3個)
- RGB LED(2個)
- 電池ボックス(2個)
- 単三電池(4個)
- スピーカー
- マイクロ USB 延長コード
- マイクロ USB ピンボード
- 抵抗 300Ω くらい(6個)
- ユニバーサル基板
- 小型 USB マイク
- マイクロ USB OTG アダプタ
- カメラモジュール
- RasPi Zero 用カメラモジュールフレキシブルケーブル
- カメラモジュールマウント部品
- 取手部品
- DC ファン
- マグネット充電ケーブル
できればロボカムの指も動かしたいところだが,一旦保留.
電源が PiSugar2 と単三電池の 2 系統あるので,少々充電が面倒.後々統一して簡単に充電できるようにしたいが,これも一旦保留.
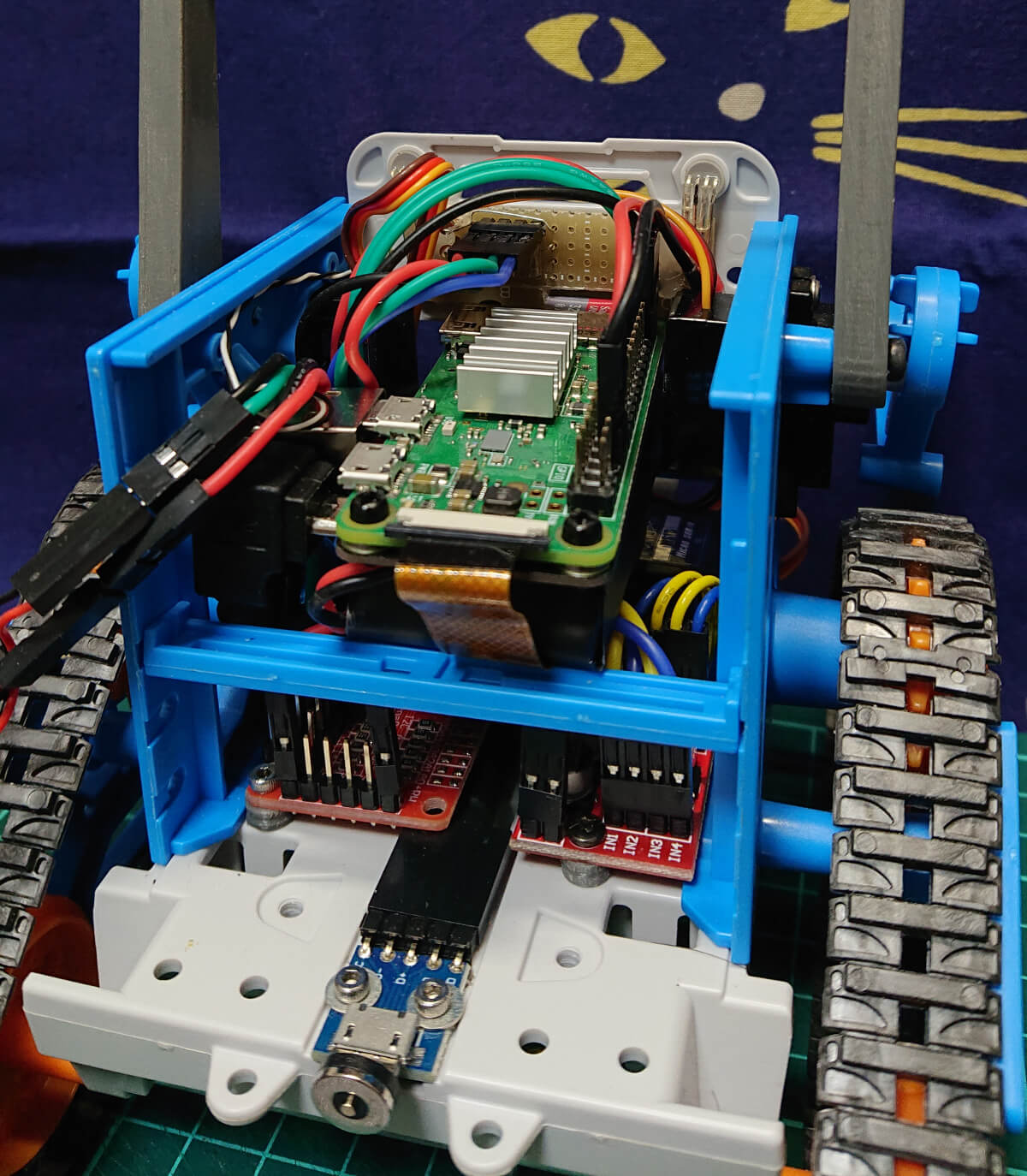
物理構成
配線はこんな感じ.抵抗は 300Ω.カラーコードは間違っている.この画像の他に PiSugar2 も接続されている.

背面の電池が重いせいであまり走破性は良くない.クローラーも三点で履帯を回しているので,障害物に乗り上げたときに三角の底辺中央部分は踏ん張りが効かない.

左右の腕のサーボの間にちょうど RasPi Zero が入るサイズ.もう何も入らん.
おわりに
カムロボの構成を整理した.ソフトウェアまた後日.もう物理的に何も入らないので機能追加はしない.ストリーミング性能に難ありなので Raspi Zero 2 が手に入ったら交換するかも.


コメント