 Hardware
Hardware 【AI3M 制御基板換装】Part4:操作系(TFT35)導入
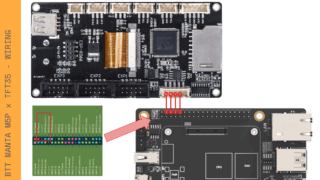
TFT35 を Klipper に接続する.
Hardware  Hardware
Hardware  Hardware
Hardware 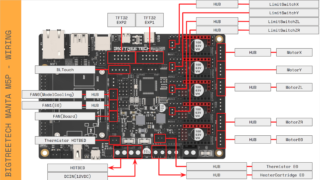 Hardware
Hardware  Software
Software 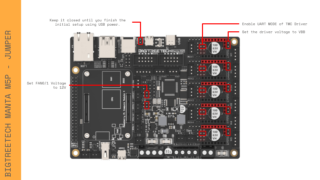 Software
Software  Hardware
Hardware  Hardware
Hardware  Hardware
Hardware  Hardware
Hardware