はじめに
カムロボの改造シリーズは以前からやっているが,今回,カムロボにジャストフィットなモバイルバッテリーを見つけてしまったので,改めて構成を見直し,材料を整理する.
材料集め
以前の構成では電池 4 本と PiSugar2 の 2 電源系統構成だった.ただでさえ場所が無いのに二箇所に電源を配置するスペース的なコストと,電源によって充電方法が異なる面倒さで,実用性皆無だったのでしばらく放置していた.

今回 CIO のモバイルバッテリーがシンデレラフィットであることを発見してしまったので,これをベースに基板の配置を見直すとともに断念していた PWM オーディオを追加する.

工具と電線は省略.電線は細めのほうがいい.
- ロボット素体
- 制御SBC
- 駆動系
- 映像系
- 音声出力系 (配線は RaspberryPi Zero W で PWM audio を参照)
- スピーカー
- PAM8403(アンプ)
- ノイズフィルタ
- 抵抗 270Ω
- 抵抗 150Ω
- コンデンサ 33nF
- コンデンサ 10uF
- ユニバーサル基板
- 音声入力系
- 発光系?
- 冷却系
- 電源系
- 3Dプリントパーツ
- カムロボパーツセット
- 一部接着剤も必要です
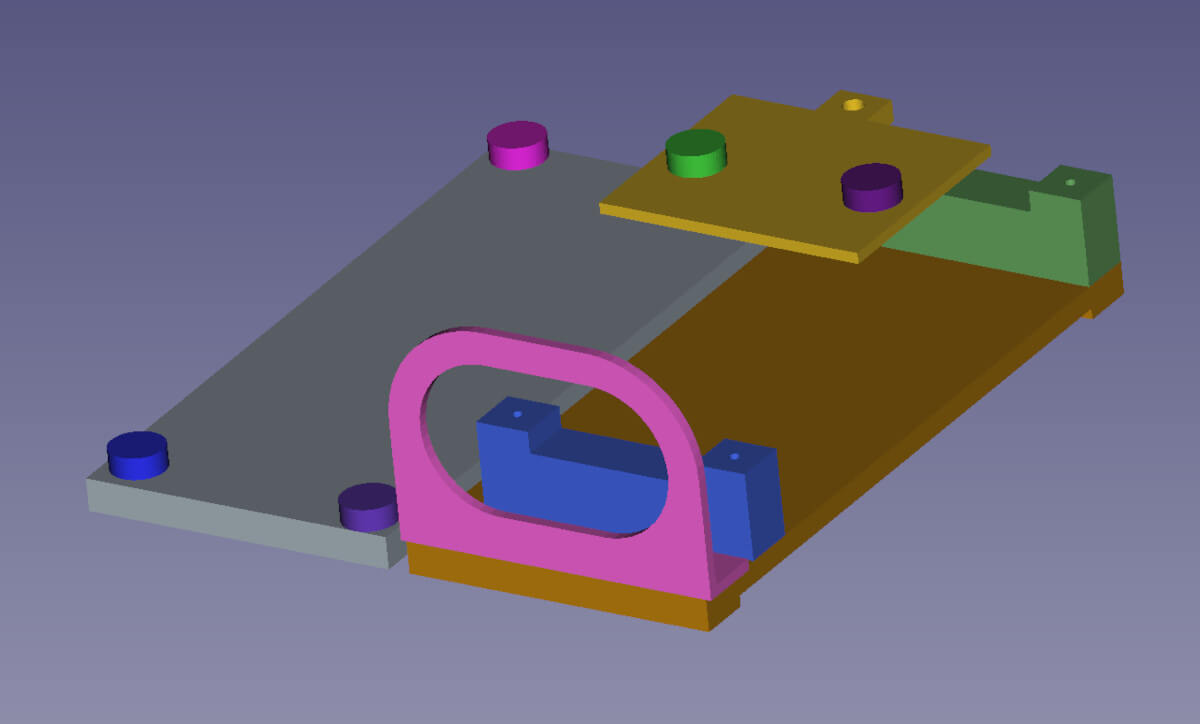
- 取手部品
- カムロボパーツセット
- ネジ類
お絵描き面倒だった.じゃなくて,実態配線図は大体前回と同じなので省略.前回の図からサーボモータを 1 つに減らして,アンプ追加して,電源をモバイルバッテリーに置き換えただけなので省略.
カムロボパーツセットの主要な部分だけ備忘.こんな感じで組み立てる.適当にネジや接着剤で固定する.

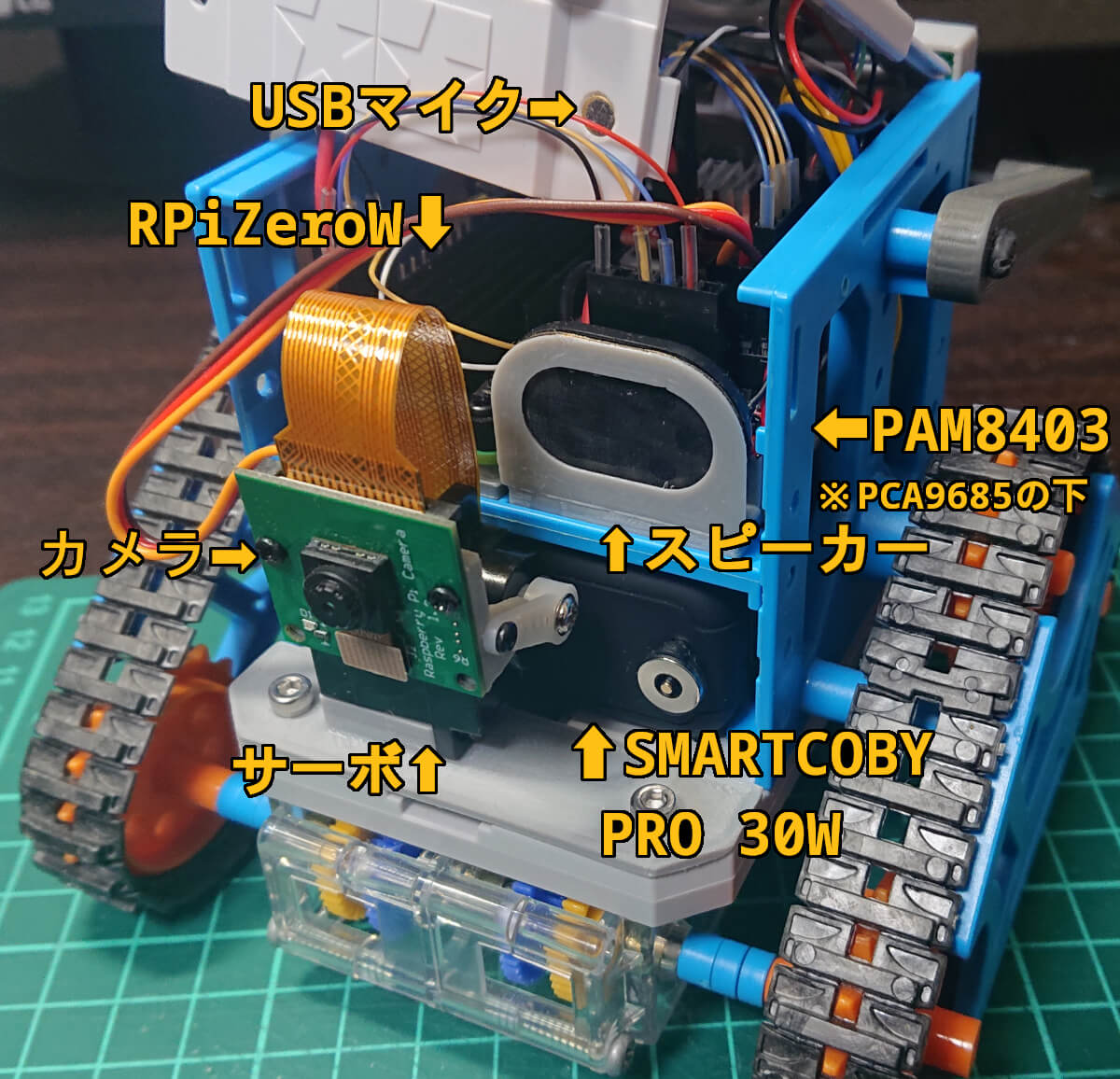
実際に基板などを詰め込むとこんな感じ.PCA9685 の設置位置を高くすることで,USB機器を接続できたり,アンプの設置スペースを確保してる.結構ギリギリなので,心配なら PCA9685 のウラ面をカプトンテープとかで絶縁しといたほうがいいかも.

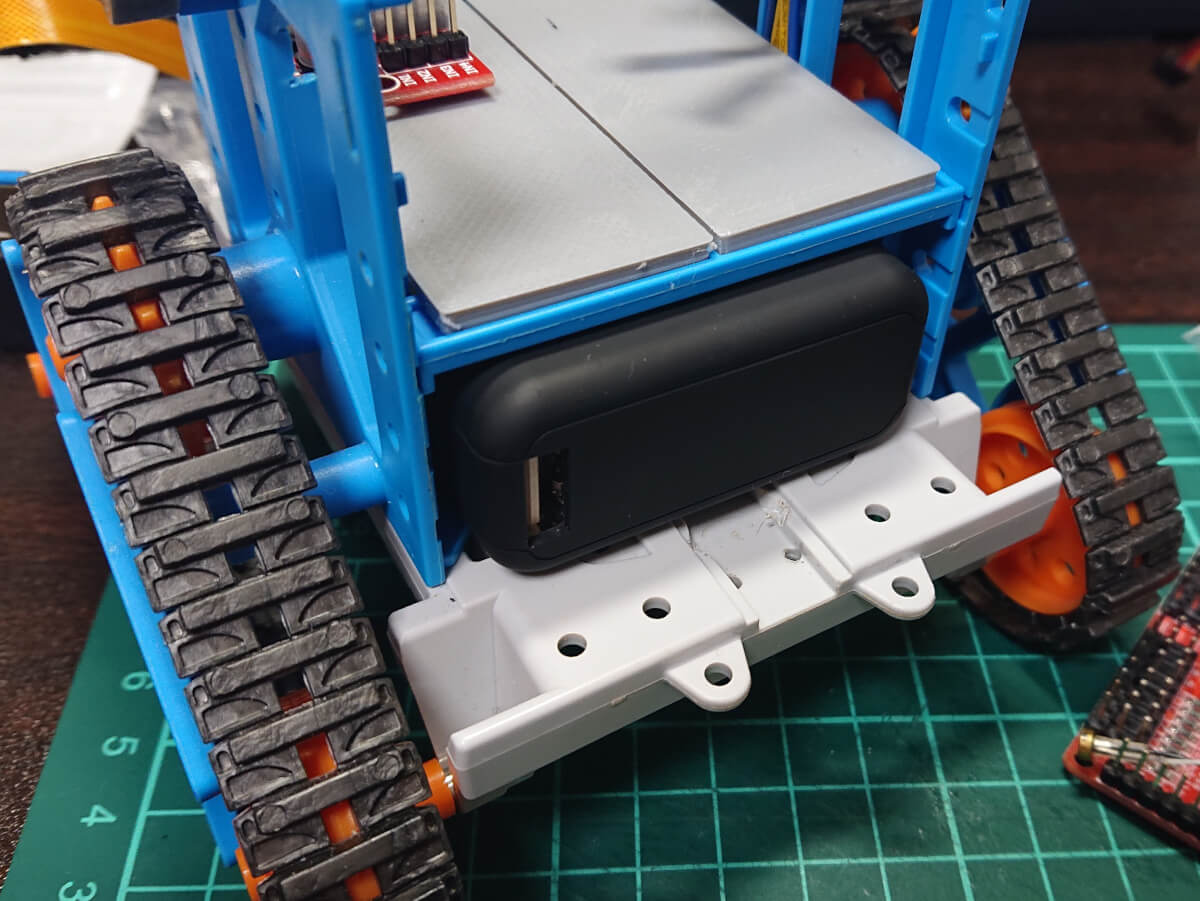
SMARTCOBY Pro 30W
カムロボのボディ幅にちょうど収まり,高さの仕切りもちょうどいい位置に設置できる.前後は若干はみ出るものの,この程度許容範囲内.電源容量もカムロボ単体での活動に申し分ない.バッテリー残量も表示してくれる.
問題はパススルー充電の切り替えタイミングの瞬断.このモバイルバッテリーはパススルー充電を謳っており,確かに充電中も問題なくカムロボを動かすことができるが,モバイルバッテリー本体の充電開始と抜線による充電終了時に瞬断が発生し,RPi が再起動してしまう.いずれコンデンサとかで瞬断対策したいところ.
あとはモータ駆動時に電源の電圧降下で RPi が RPi が落ちることがある.一応仕様上 30W 出力できるっぽいが,モータのようなクイックな負荷の変動には強くないのかも.
コンデンサ追加してみた様子.リブートするほどの電圧降下は回避できるようになった(気がする).
おわりに
以前の記事でもう何も入らんって書いてたけど,ボディ内デフラグすれば意外となんとか詰め込めるもんだ.が,流石にもう何も入らん.
モータへのパスコン追加と電源瞬断問題も後々解決したいところ.

コメント